Arman Asgharpoor Golroudbari
Machine Learning Engineer
AI-Ark
Fasta Robotics
Students' Scientific Research Center
Biography
Machine Learning Engineer | AI Researcher | Deep Learning Specialist
Hello! I’m Arman, a Machine Learning Engineer with 5+ years of experience specializing in Large Language Models, transformer architectures, computer vision systems, and autonomous robotics. I focus on building production-ready AI solutions that bridge research and industry applications.
Professional Focus
My expertise spans across enterprise AI solutions, where I’ve implemented production-ready RAG systems reducing operational costs by 35% through PEFT/LoRA fine-tuning and quantization techniques. I’ve built retrieval systems with 92% accuracy using vector embeddings and hybrid retrieval approaches, developed multimodal pipelines integrating vision models with transformers, and deployed end-to-end ML infrastructure across major cloud platforms.
Research & Development
My research interests center on robot learning and autonomous navigation, with a core focus on developing self-adaptive neural networks for robust autonomous systems:
Core Research Areas:
- Visual-Inertial SLAM: Multi-modal perception and real-time state estimation for navigation under uncertainty
- End-to-end Learning: Real-time navigation in dynamic and uncertain environments
- Robust Sensor Fusion: Adaptive decision-making in unstructured terrains
- Vision-Language Models: Semantic scene understanding for autonomous systems
- Large Language Models: Interpretable navigation and mission planning
Current Research Direction: Developing self-adaptive neural networks combining:
- Vision-language models for semantic scene understanding
- Learning-based multi-sensor fusion for unstructured environments
- Learning-based SLAM optimization with physics-informed approaches
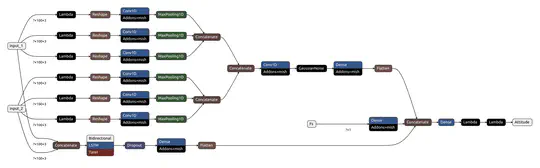
Recent Work: Transformer-Enhanced Physics-Informed Neural Networks (TE-PINN) achieving 36.8% error reduction in attitude estimation, submitted to ICRA 2025. This work integrates multi-head attention mechanisms with physics-based constraints (quaternion kinematics, rigid body dynamics) for robust real-time orientation estimation in high-noise, dynamic conditions.
Core Competencies
LLMs & NLP: PEFT/LoRA fine-tuning, 4-bit/8-bit quantization (GGUF, AWQ), RAG systems, prompt engineering Computer Vision: Object detection, segmentation, vision-language modeling (YOLO, Mask R-CNN, Vision Transformers) Autonomous Systems: ROS2, ORB-SLAM3, LiDAR-SLAM, visual-inertial odometry, multi-sensor fusion Data Infrastructure: Vector databases (FAISS, Qdrant, Vespa), BM25/TF-IDF indexing, hybrid retrieval systems ML Frameworks: PyTorch, TensorFlow, HuggingFace, Docker, FastAPI, TorchServe, DeepSpeed
Explore my professional experience and research projects in detail by visiting Experiences.
Research Collaborations: I am actively seeking opportunities for academic research collaborations in robot learning, vision-based navigation, and LLM applications for autonomous systems. 🤝💡
Selected Achievements
- Published Researcher: Papers in Elsevier Measurement (IF 5.2), submitted to ICRA 2025, BMC Medical Education
- Competition Winner: Ranked 1st in Oxford ML Summer School Health & Medicine track (120+ participants)
- MIT IAIFI Program: Research participant in AI+Physics program focusing on simulation-based inference
- Production AI: Deployed RAG systems processing 5M+ documents daily, achieving 92% retrieval accuracy
- Autonomous Robotics: Implemented VIO-LiDAR fusion achieving 15cm localization accuracy in warehouse environments
- Academic Service: Reviewed 100+ papers for IEEE, Elsevier journals; Outstanding Reviewer Award (2023)
Teaching & Mentoring
- Co-Instructor @ Tehran University of Medical Sciences: Application of Technology in Research
- Teaching Assistant @ University of Tehran: Fuzzy Logic (Graduate Level)
- Thesis Supervisor: 5 undergraduate theses, 1 master’s thesis in AI and robotics
- Mentor @ Space Generation Advisory Council: Guiding professionals in computer vision and AI
Feel free to reach out for research collaborations or to discuss AI/ML projects.
- Robot Learning & Autonomous Navigation
- Large Language Models & RAG Systems
- Computer Vision & Deep Learning
M.Sc. Space Engineering (GPA 4.00/4.00), 2022
University of Tehran, Tehran, Iran
MBA (GPA 4.00/4.00), 2020
Academic Center for Education, Culture and Research, Tehran, Iran
B.Eng. Avionics (GPA 3.80/4.00), 2019
University of Applied Science and Technology, Tehran, Iran
Associate, Avionics, 2016
Civil Aviation Technology College, Tehran, Iran
Recent Publications
Academic Services
Outstanding Reviewer Award (2023) - IEEE Transactions on Instrumentation & Measurement
Including:
- IEEE Robotics and Automation Letters
- IEEE Transactions on Instrumentation & Measurement, 43 Papers
- IEEE Sensors
- Wiley Journal of Field Robotics
- Elsevier Automatica
- Elsevier Aerospace Science and Technology, 15 Papers
- Elsevier Measurement, 6 Papers
- Springer Visual Computing for Industry, Biomedicine, and Art
- Space: Science & Technology, 4 Papers
- The Aeronautical Journal, 3 Papers
- IEEE Instrumentation & Measurement Magazine, 1 Paper
- IEEE Open Access Journal on Circuits and Systems, 1 Paper
- Complete list on ORCID and Web of Science
- International Conference on Robotics and Automation (ICRA) 2024
- International Conference on Learning Representations (ICLR) 2024
- American Control Conference (ACC) 2023, 2024, Toronto, ON, Canada
- International Federation of Automatic Control (IFAC) World Congress 2023, Yokohama, Japan
Responsibilities include:
- Analyzed and evaluated research proposals to determine if they are appropriate for funding
Teaching Experience
Co-Instructor
Tehran University of Medical Sciences | Sep. 2022 - Present
- Course: Application of Technology in Research (Graduate Level)
- Designed and taught graduate-level courses in advanced search techniques
- Conducted office hours, fostering academic excellence and professional growth
- Students: 100+ graduate and undergraduate students (B.Sc., M.D., M.Sc., Ph.D.)
Teaching Assistant
University of Tehran | Sep. 2021 - Sep. 2022
- Course: Fuzzy Logic (Graduate Level)
- Instructor: Dr. M.H. Sabour
- Designed and supervised projects, enhancing programming skills for 15+ graduate students
- Enhanced academic and professional growth through focused office hours
Instructor
Aviation Industry Training Center | Sep. 2018 - Sep. 2021
- Instructed 11 courses on Electronics, Navigation, and Aviation (Undergraduate)
- Students: 150+ undergraduate students
- Delivered high-caliber education, nurturing skilled aerospace professionals
Thesis Supervisor
Aviation Industry Training Center & University of Tehran | Sep. 2019 - Present
Supervised 5 Undergraduate Theses:
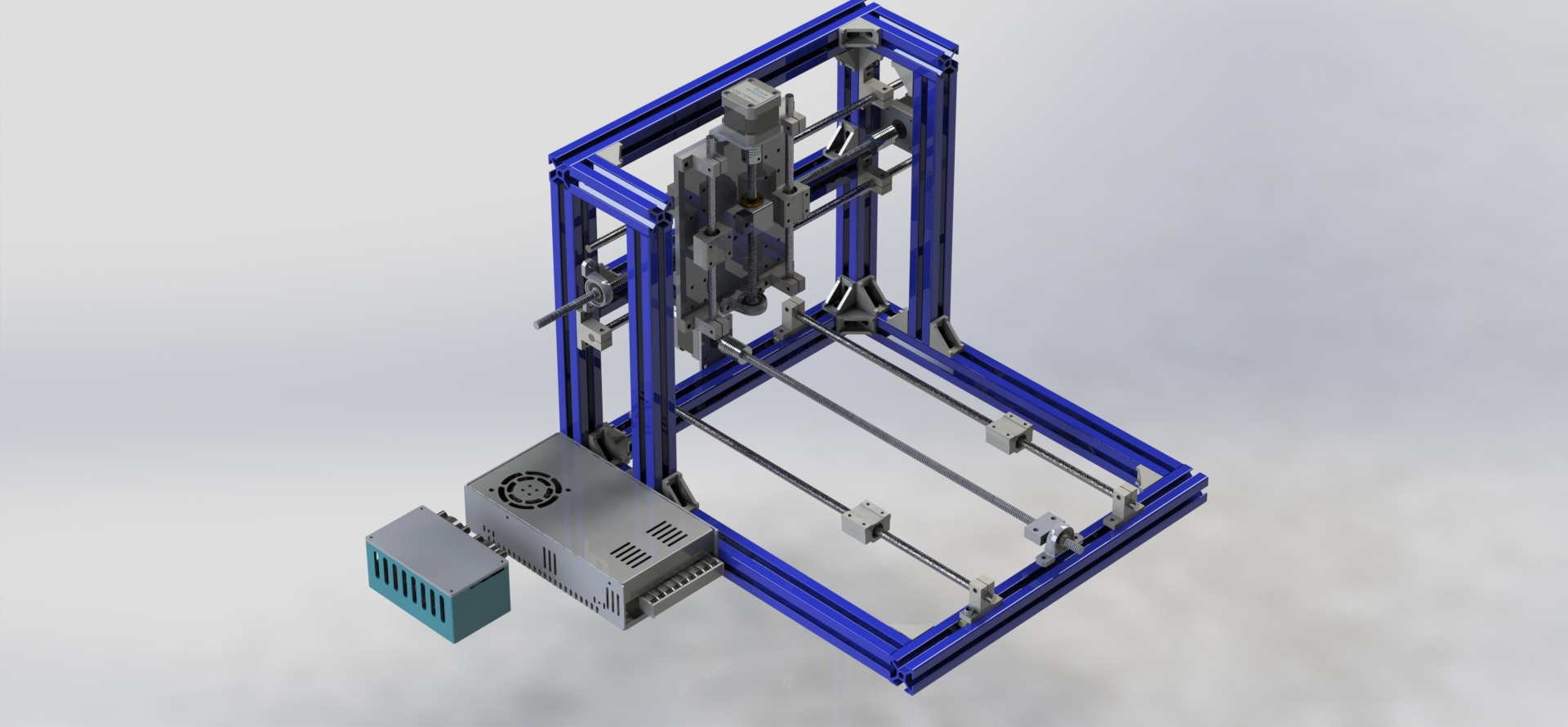
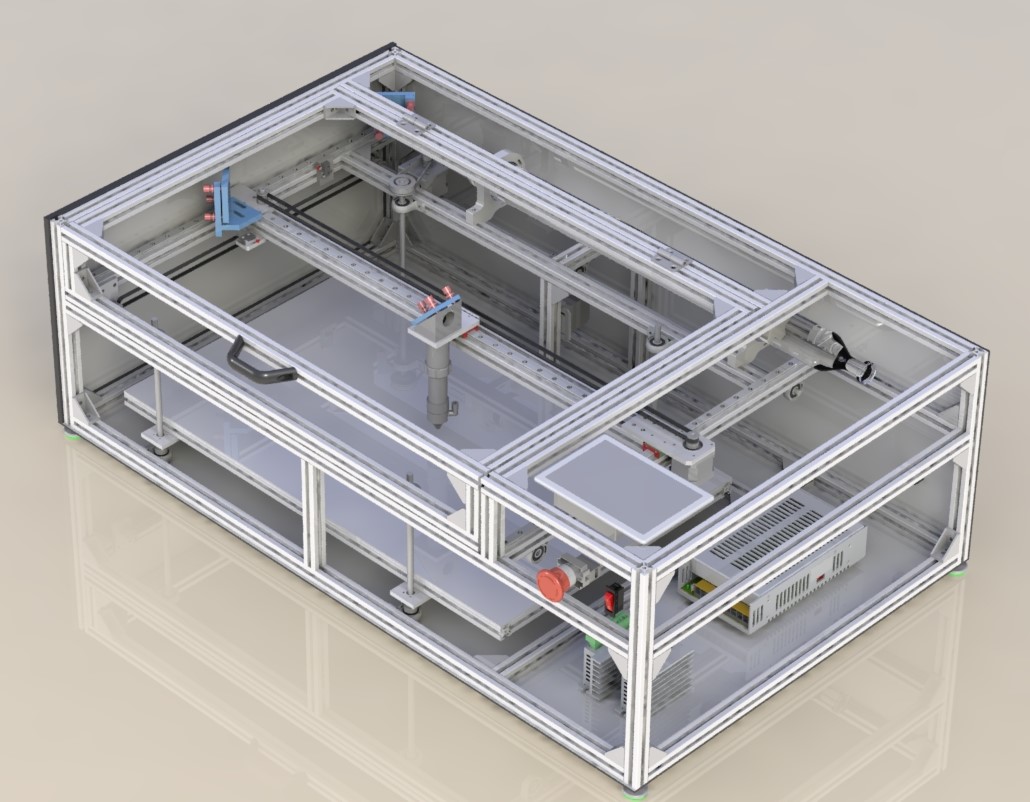
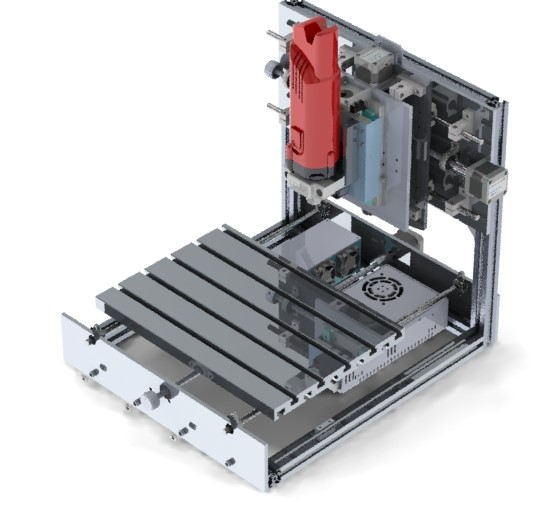
- Design and Implementation of a 3 Axis CNC Machine (Spring 2021 - Fall 2021)
- Design and Implementation of Pulse Circuits Training Board (Fall 2020 - Fall 2021)
- Design, Simulation, and Building of an Aircraft Fire Extinguishing System (Spring 2020 - Fall 2020)
- Design and Implementation of Retractable Landing Gear (Fall 2019 - Spring 2020)
- Design and Implementation of a CNC Hot Wire (Fall 2019 - Spring 2020)
Supervised 1 Master’s Thesis:
- AI and Robotics Applications (In Progress)
Research Supervision
Students’ Scientific Research Center | May 2023 - Present
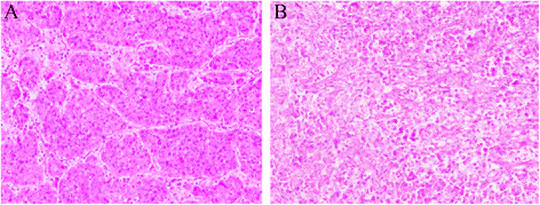
- Guiding 10+ students in creating AI medical imaging tools for disease detection
- Leading team in six systematic reviews on AI-powered Medical Imaging Analysis
Recent Posts
Projects
Gallery
























Contact
- A.Asgharpoor@ut.ac.ir
- +974 (550) 58203
- Innovation Center, SSRC, Vesal st., Tehran,
- Book an appointment
- Skype Me