OxIOD IMU Dataset
OxIOD Dataset
Oxford Inertial Odometry Dataset [1] is a large set of inertial data for inertial odometry which is recorded by smartphones at 100 Hz in indoor environment. The suite consists of 158 tests and covers a distance of over 42 km, with OMC ground track available for 132 tests. Therefore, it does not include pure rotational movements and pure translational movements, which are helpful for systematically evaluating the model’s performance under different conditions; however, it covers a wide range of everyday movements.
Due to the different focus, some information (for example, the alignment of the coordinate frames) is not accurately described. In addition, the orientation of the ground trace contains frequent irregularities (e.g., jumps in orientation that are not accompanied by similar jumps in the IMU data). The dataset is available at Link.
How to use OxIOD Dataset
The dataset can be download from here. The Dataset Contains:
24 Handheld Sequences
Total 8821 seconds for 7193 meters.
| data1 | time (s) | distance (m) |
|---|---|---|
| seq1 | 376 | 301 |
| seq2 | 234 | 177 |
| seq3 | 188 | 147 |
| seq4 | 216 | 166 |
| seq5 | 322 | 264 |
| seq6 | 325 | 274 |
| seq7 | 141 | 118 |
| total | 1802 | 1447 |
| data2 | time (s) | dis (m) |
|---|---|---|
| seq1 | 326 | 281 |
| seq2 | 312 | 264 |
| seq3 | 301 | 249 |
| total | 939 | 794 |
| data3 | time | dis |
|---|---|---|
| seq1 | 308 | 251 |
| seq2 | 379 | 324 |
| seq3 | 609 | 533 |
| seq4 | 538 | 467 |
| seq5 | 383 | 319 |
| total | 2217 | 1894 |
| data4 | time | dis |
|---|---|---|
| seq1 | 317 | 242 |
| seq2 | 322 | 243 |
| seq3 | 606 | 476 |
| seq4 | 438 | 359 |
| seq5 | 350 | 284 |
| total | 2033 | 1604 |
| data5 | time | dis |
|---|---|---|
| seq1 | 310 | 237 |
| seq2 | 594 | 466 |
| seq3 | 560 | 445 |
| seq4 | 366 | 306 |
| total | 1830 | 1454 |
11 Pocket Sequences
Total 5622 seconds for 4231 meters.
| data1 | time | dis |
|---|---|---|
| seq1 | 330 | 284 |
| seq2 | 456 | 379 |
| seq3 | 506 | 405 |
| seq4 | 491 | 387 |
| seq5 | 240 | 182 |
| total | 2023 | 1637 |
| data2 | time | dis |
|---|---|---|
| seq1 | 651 | 492 |
| seq2 | 559 | 414 |
| seq3 | 628 | 429 |
| seq4 | 668 | 494 |
| seq5 | 470 | 371 |
| seq6 | 623 | 494 |
| total | 3599 | 2694 |
8 Handbag Sequences
Total 4100 seconds for 3431 meters.
| data1 | time | dis |
|---|---|---|
| seq1 | 575 | 437 |
| seq2 | 570 | 467 |
| seq3 | 580 | 466 |
| seq4 | 445 | 366 |
| total | 2170 | 1736 |
| data2 | time | dis |
|---|---|---|
| seq1 | 575 | 487 |
| seq2 | 560 | 499 |
| seq3 | 425 | 381 |
| seq4 | 370 | 328 |
| total | 1930 | 1695 |
13 Trolley Sequences
Total 4262 seconds for 2685 meters.
| data1 | time | dis |
|---|---|---|
| seq1 | 447 | 251 |
| seq2 | 309 | 169 |
| seq3 | 359 | 209 |
| seq4 | 599 | 362 |
| seq5 | 612 | 374 |
| seq6 | 586 | 380 |
| seq7 | 274 | 174 |
| total | 3186 | 1919 |
| data2 | time | dis |
|---|---|---|
| seq1 | 156 | 106 |
| seq2 | 168 | 118 |
| seq3 | 161 | 113 |
| seq4 | 163 | 113 |
| seq5 | 217 | 158 |
| seq6 | 211 | 158 |
| total | 1076 | 766 |
8 Slow Walking Sequences
Total 4150 seconds for 2421 meters.
| data1 | time | dis |
|---|---|---|
| seq1 | 612 | 382 |
| seq2 | 603 | 353 |
| seq3 | 617 | 341 |
| seq4 | 594 | 323 |
| seq5 | 606 | 352 |
| seq6 | 503 | 331 |
| seq7 | 311 | 172 |
| seq8 | 304 | 167 |
| total | 4150 | 2421 |
7 Running Sequences
Total 3732 seconds for 4356 meters.
| data1 | time | dis |
|---|---|---|
| seq1 | 691 | 761 |
| seq2 | 623 | 719 |
| seq3 | 590 | 665 |
| seq4 | 603 | 679 |
| seq5 | 619 | 766 |
| seq6 | 303 | 373 |
| seq7 | 303 | 393 |
| total | 3732 | 4356 |
26 Multi Devices Sequences
Total 7144 seconds for 5350 meters.
| iPhone 5 | time | dis |
|---|---|---|
| seq1 | 178 | 150 |
| seq2 | 163 | 133 |
| seq3 | 160 | 126 |
| seq4 | 124 | 100 |
| seq5 | 174 | 139 |
| seq6 | 167 | 136 |
| seq7 | 197 | 150 |
| seq8 | 184 | 141 |
| seq9 | 184 | 142 |
| total | 1531 | 1217 |
| iPhone 6 | time | dis |
|---|---|---|
| seq1 | 180 | 165 |
| seq2 | 184 | 171 |
| seq3 | 182 | 168 |
| seq4 | 150 | 140 |
| seq5 | 183 | 162 |
| seq6 | 171 | 155 |
| seq7 | 184 | 139 |
| seq8 | 185 | 148 |
| seq9 | 173 | 133 |
| total | 1592 | 1381 |
| nexus 5 | time | dis |
|---|---|---|
| seq1 | 604 | 452 |
| seq2 | 609 | 438 |
| seq3 | 605 | 414 |
| seq4 | 609 | 403 |
| seq5 | 607 | 388 |
| seq6 | 607 | 401 |
| seq7 | 186 | 130 |
| seq8 | 194 | 127 |
| total | 4021 | 2752 |
35 Multi Users Sequences
Total 8821 seconds for 9465 meters.
| user 2 | time | dis |
|---|---|---|
| seq1 | 311 | 284 |
| seq2 | 358 | 313 |
| seq3 | 390 | 328 |
| seq4 | 217 | 172 |
| seq5 | 311 | 240 |
| seq6 | 256 | 193 |
| seq7 | 371 | 296 |
| seq8 | 450 | 375 |
| seq9 | 264 | 221 |
| total | 2928 | 2422 |
| user 3 | time | dis |
|---|---|---|
| seq1 | 382 | 301 |
| seq2 | 318 | 272 |
| seq3 | 340 | 295 |
| seq4 | 232 | 198 |
| seq5 | 214 | 185 |
| seq6 | 356 | 289 |
| seq7 | 258 | 203 |
| total | 2100 | 1743 |
| user 4 | time | dis |
|---|---|---|
| seq1 | 387 | 367 |
| seq2 | 329 | 307 |
| seq3 | 305 | 288 |
| seq4 | 248 | 229 |
| seq5 | 356 | 314 |
| seq6 | 293 | 272 |
| seq7 | 297 | 260 |
| seq8 | 468 | 411 |
| seq9 | 435 | 364 |
| total | 3118 | 2812 |
| user 5 | time | dis |
|---|---|---|
| seq1 | 294 | 237 |
| seq2 | 305 | 264 |
| seq3 | 253 | 211 |
| seq4 | 390 | 337 |
| seq5 | 300 | 226 |
| seq6 | 338 | 284 |
| seq7 | 168 | 154 |
| seq8 | 410 | 395 |
| seq9 | 274 | 250 |
| seq10 | 152 | 130 |
| total | 2884 | 2488 |
26 Large Scale Sequences
Total 4161 seconds for 3465 meters.
| floor1 | time | dis |
|---|---|---|
| seq1 | 153 | 142 |
| seq2 | 165 | 143 |
| seq3 | 158 | 142 |
| seq4 | 157 | 145 |
| seq5 | 156 | 142 |
| seq6 | 156 | 142 |
| seq7 | 161 | 144 |
| seq8 | 155 | 143 |
| seq9 | 160 | 126 |
| seq10 | 158 | 143 |
| total | 1579 | 1412 |
| floor4 | time | dis |
|---|---|---|
| seq1 | 160 | 170 |
| seq2 | 157 | 153 |
| seq3 | 162 | 153 |
| seq4 | 118 | 106 |
| seq5 | 164 | 153 |
| seq6 | 163 | 143 |
| seq7 | 169 | 141 |
| seq8 | 166 | 153 |
| seq9 | 172 | 135 |
| seq10 | 169 | 154 |
| seq11 | 166 | 152 |
| seq12 | 165 | 154 |
| seq13 | 165 | 133 |
| seq14 | 164 | 153 |
| seq15 | 163 | 153 |
| seq16 | 159 | 133 |
| total | 2582 | 2053 |
In each folder, there is a raw data subfolder and a syn data subfolder, which represent the raw data collection without synchronisation but with high precise timestep, and the synchronised data but without high precise timestep.
The header of files is
vicon (vi.csv)*
- Time
- Header
- translation.x translation.y translation.z
- rotation.x rotation.y rotation.z rotation.w
Sensors (imu.csv)*
- Time
- attitude_roll(radians) attitude_pitch(radians) attitude_yaw(radians)
- rotation_rate_x(radians/s) rotation_rate_y(radians/s) rotation_rate_z(radians/s)
- gravity_x(G) gravity_y(G) gravity_z(G)
- user_acc_x(G) user_acc_y(G) user_acc_z(G)
- magnetic_field_x(microteslas) magnetic_field_y(microteslas) magnetic_field_z(microteslas)
Use OxIOD Dataset in Python
First, we need to import libraries
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
Create variables to store data
imu_data_OxIOD =[]
gt_data_OxIOD = []
imu = np.zeros((1,9))
gt = np.zeros((1,7))
Load data files
imu_data_OxIOD.append(
'handheld/data5/syn/imu3.csv')
imu_data_OxIOD.append(
'handheld/data2/syn/imu1.csv')
imu_data_OxIOD.append(
'handheld/data2/syn/imu2.csv')
imu_data_OxIOD.append(
'handheld/data5/syn/imu2.csv')
imu_data_OxIOD.append(
'handheld/data3/syn/imu4.csv')
imu_data_OxIOD.append(
'handheld/data4/syn/imu4.csv')
imu_data_OxIOD.append(
'handheld/data4/syn/imu2.csv')
imu_data_OxIOD.append(
'handheld/data1/syn/imu7.csv')
imu_data_OxIOD.append(
'handheld/data5/syn/imu4.csv')
imu_data_OxIOD.append(
'handheld/data4/syn/imu5.csv')
imu_data_OxIOD.append(
'handheld/data1/syn/imu3.csv')
imu_data_OxIOD.append(
'handheld/data3/syn/imu2.csv')
imu_data_OxIOD.append(
'handheld/data2/syn/imu3.csv')
imu_data_OxIOD.append(
'handheld/data1/syn/imu1.csv')
imu_data_OxIOD.append(
'handheld/data3/syn/imu3.csv')
imu_data_OxIOD.append(
'handheld/data3/syn/imu5.csv')
imu_data_OxIOD.append(
'handheld/data1/syn/imu4.csv')
gt_data_OxIOD.append(
'handheld/data5/syn/vi3.csv')
gt_data_OxIOD.append(
'handheld/data2/syn/vi1.csv')
gt_data_OxIOD.append(
'handheld/data2/syn/vi2.csv')
gt_data_OxIOD.append(
'handheld/data5/syn/vi2.csv')
gt_data_OxIOD.append(
'handheld/data3/syn/vi4.csv')
gt_data_OxIOD.append(
'handheld/data4/syn/vi4.csv')
gt_data_OxIOD.append(
'handheld/data4/syn/vi2.csv')
gt_data_OxIOD.append(
'handheld/data1/syn/vi7.csv')
gt_data_OxIOD.append(
'handheld/data5/syn/vi4.csv')
gt_data_OxIOD.append(
'handheld/data4/syn/vi5.csv')
gt_data_OxIOD.append(
'handheld/data1/syn/vi3.csv')
gt_data_OxIOD.append(
'handheld/data3/syn/vi2.csv')
gt_data_OxIOD.append(
'handheld/data2/syn/vi3.csv')
gt_data_OxIOD.append(
'handheld/data1/syn/vi1.csv')
gt_data_OxIOD.append(
'handheld/data3/syn/vi3.csv')
gt_data_OxIOD.append(
'handheld/data3/syn/vi5.csv')
gt_data_OxIOD.append(
'handheld/data1/syn/vi4.csv')
Import data from file
for i, (imu_data_filename, gt_data_filename) in enumerate(zip(imu_data_OxIOD, gt_data_OxIOD)):
oxiod_gt = pd.read_csv(gt_data_filename).values
oxiod_imu = pd.read_csv(imu_data_filename).values
oxiod_imu = np.hstack([oxiod_imu[:, 10:13], oxiod_imu[:, 4:7], oxiod_imu[:, 7:10]])
oxiod_gt = np.hstack([np.concatenate([oxiod_gt[:, 8:9], oxiod_gt[:, 5:8]], axis=1), oxiod_gt[:, 2:5]])
imu = np.vstack([imu, oxiod_imu])
gt = np.vstack([gt,oxiod_gt])
acc = imu[:,0:3]
gyro =imu[:,3:6]
mag = imu[:,6:9]
ori = gt[:,0:4]
pose = gt[:,4:7]
Store in csv file
df_imu = pd.DataFrame({'Acc x': acc[1:, 0], 'Acc y': acc[1:, 1], 'Acc z': acc[1:, 2], 'Gyro x': gyro[1:, 0],
'Gyro y': gyro[1:, 1], 'Gyro z': gyro[1:, 2], 'Mag x': mag[1:, 0], 'Mag y': mag[1:, 1], 'Mag z': mag[1:, 2]})
df_imu.to_csv('OxIOD_IMU_train.csv', index=False)
df_gt = pd.DataFrame({'Ori w': ori[1:, 0], 'Ori x': ori[1:, 1], 'Ori y': ori[1:, 2],
'Ori z': ori[1:, 3], 'Pose x': pose[1:, 0], 'Pose y': pose[1:, 1], 'Pose z': pose[1:, 2]})
df_gt.to_csv('OxIOD_GT_train.csv', index=False)
The data could be plot by
import matplotlib.pyplot as plt
fs = 100
dt = 1/fs
t = np.arange(0, acc.shape[0]/fs, dt)
# Plot the IMU readings
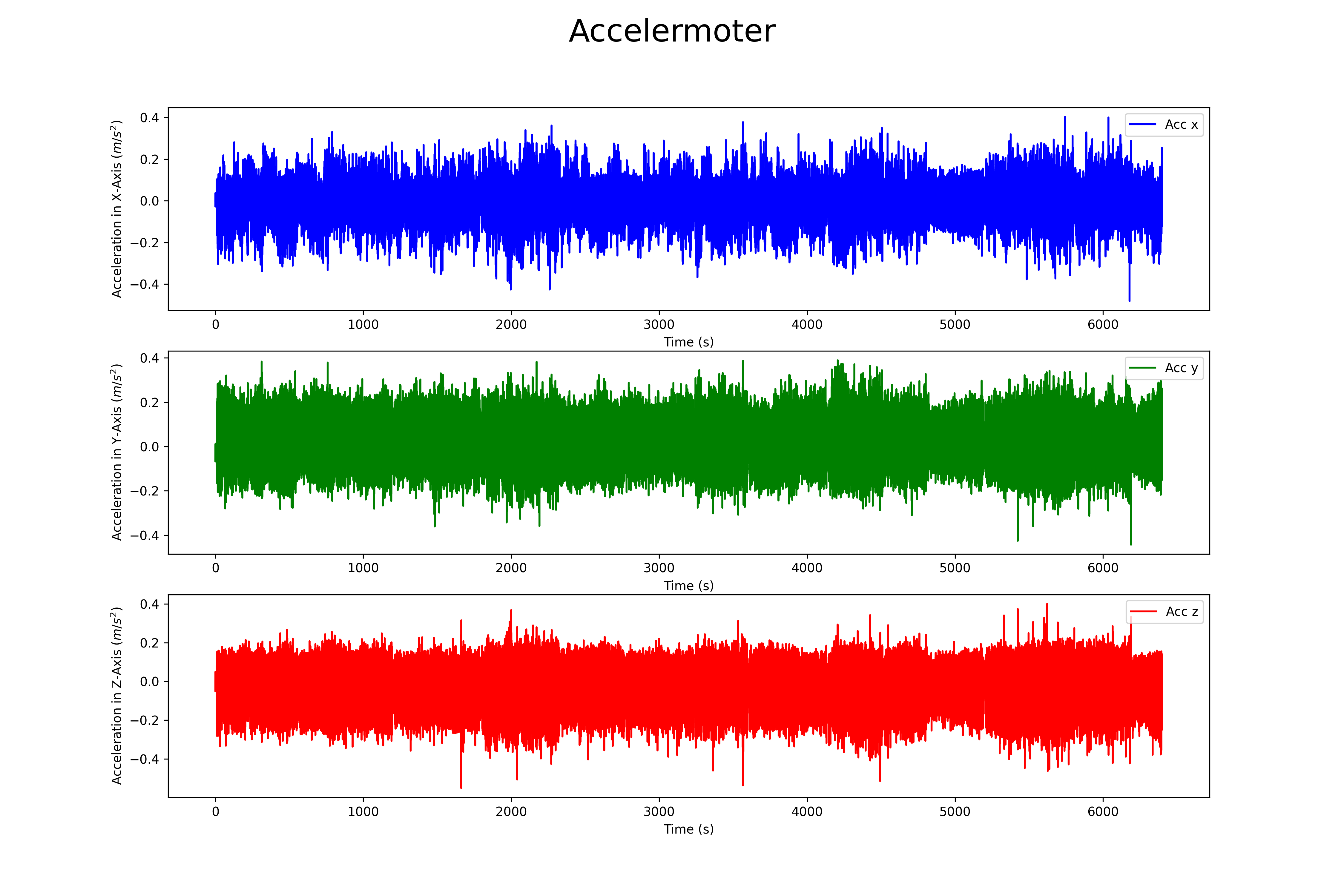
## Accelermoter
# Plotting the three axis of the accelerometer in one figure.
plt.figure(figsize=(15, 10))
plt.subplot(3, 1, 1)
plt.plot(t, acc[:, 0], label='Acc x', color='b')
plt.legend(loc="upper right")
plt.xlabel('Time (s)')
plt.ylabel('Acceleration in X-Axis ($m/s^2$)')
plt.subplot(3, 1, 2)
plt.plot(t, acc[:, 1], label='Acc y', color='g')
plt.legend(loc="upper right")
plt.xlabel('Time (s)')
plt.ylabel('Acceleration in Y-Axis ($m/s^2$)')
plt.subplot(3, 1, 3)
plt.plot(t, acc[:, 2], label='Acc z', color='r')
plt.xlabel('Time (s)')
plt.ylabel('Acceleration in Z-Axis ($m/s^2$)')
plt.legend(loc="upper right")
plt.suptitle("Accelermoter", fontsize=25)
plt.savefig('RIDI_Acc.png', dpi=300)
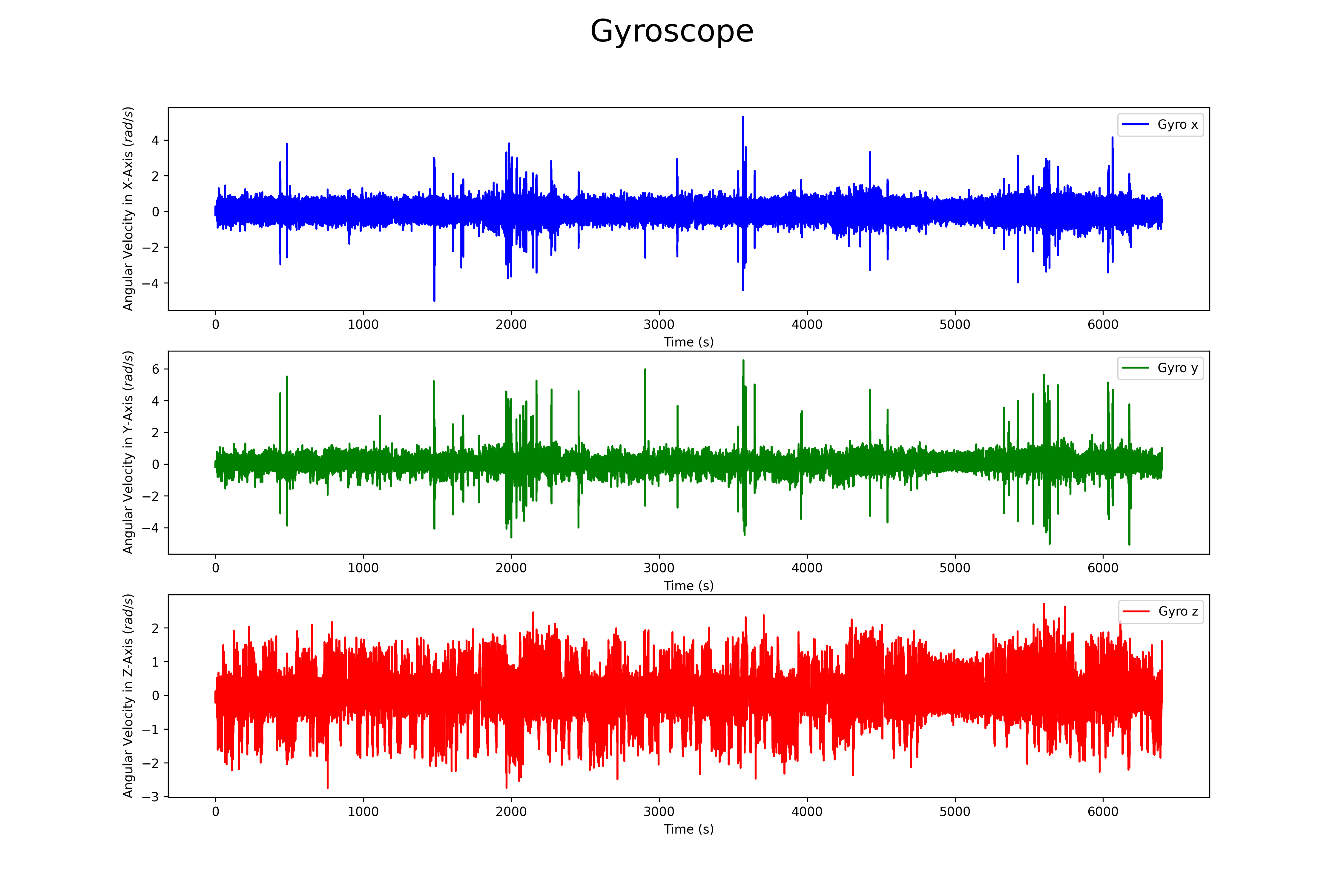
## Gyroscope
# Plotting the three axis of the gyroscope in one figure.
plt.figure(figsize=(15, 10))
plt.subplot(3, 1, 1)
plt.plot(t, gyro[:, 0], label='Gyro x', color='b')
plt.legend(loc="upper right")
plt.xlabel('Time (s)')
plt.ylabel('Angular Velocity in X-Axis ($rad/s$)')
plt.subplot(3, 1, 2)
plt.plot(t, gyro[:, 1], label='Gyro y', color='g')
plt.legend(loc="upper right")
plt.xlabel('Time (s)')
plt.ylabel('Angular Velocity in Y-Axis ($rad/s$)')
plt.subplot(3, 1, 3)
plt.plot(t, gyro[:, 2], label='Gyro z', color='r')
plt.xlabel('Time (s)')
plt.ylabel('Angular Velocity in Z-Axis ($rad/s$)')
plt.legend(loc="upper right")
plt.suptitle("Gyroscope", fontsize=25)
plt.savefig('RIDI_Gyro.png', dpi=300)
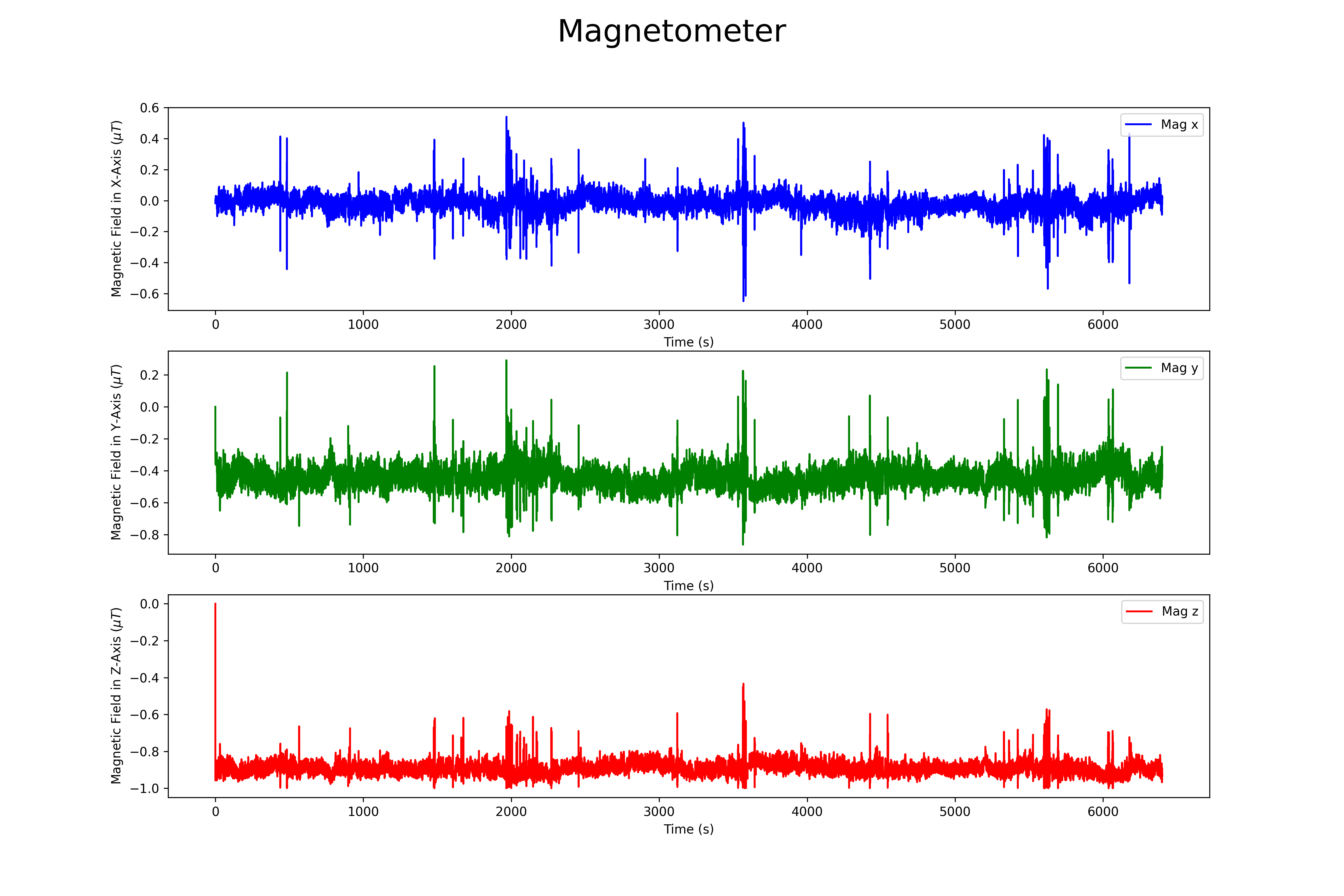
## Magnetometer
# Plotting the three axis of the magnetometer in one figure.
plt.figure(figsize=(15, 10))
plt.subplot(3, 1, 1)
plt.plot(t, mag[:, 0], label='Mag x', color='b')
plt.legend(loc="upper right")
plt.xlabel('Time (s)')
plt.ylabel('Magnetic Field in X-Axis ($\mu T$)')
plt.subplot(3, 1, 2)
plt.plot(t, mag[:, 1], label='Mag y', color='g')
plt.legend(loc="upper right")
plt.xlabel('Time (s)')
plt.ylabel('Magnetic Field in Y-Axis ($\mu T$)')
plt.subplot(3, 1, 3)
plt.plot(t, mag[:, 2], label='Mag z', color='r')
plt.xlabel('Time (s)')
plt.ylabel('Magnetic Field in Z-Axis ($\mu T$)')
plt.legend(loc="upper right")
plt.suptitle("Magnetometer", fontsize=25)
plt.savefig('RIDI_Mag.png', dpi=300)
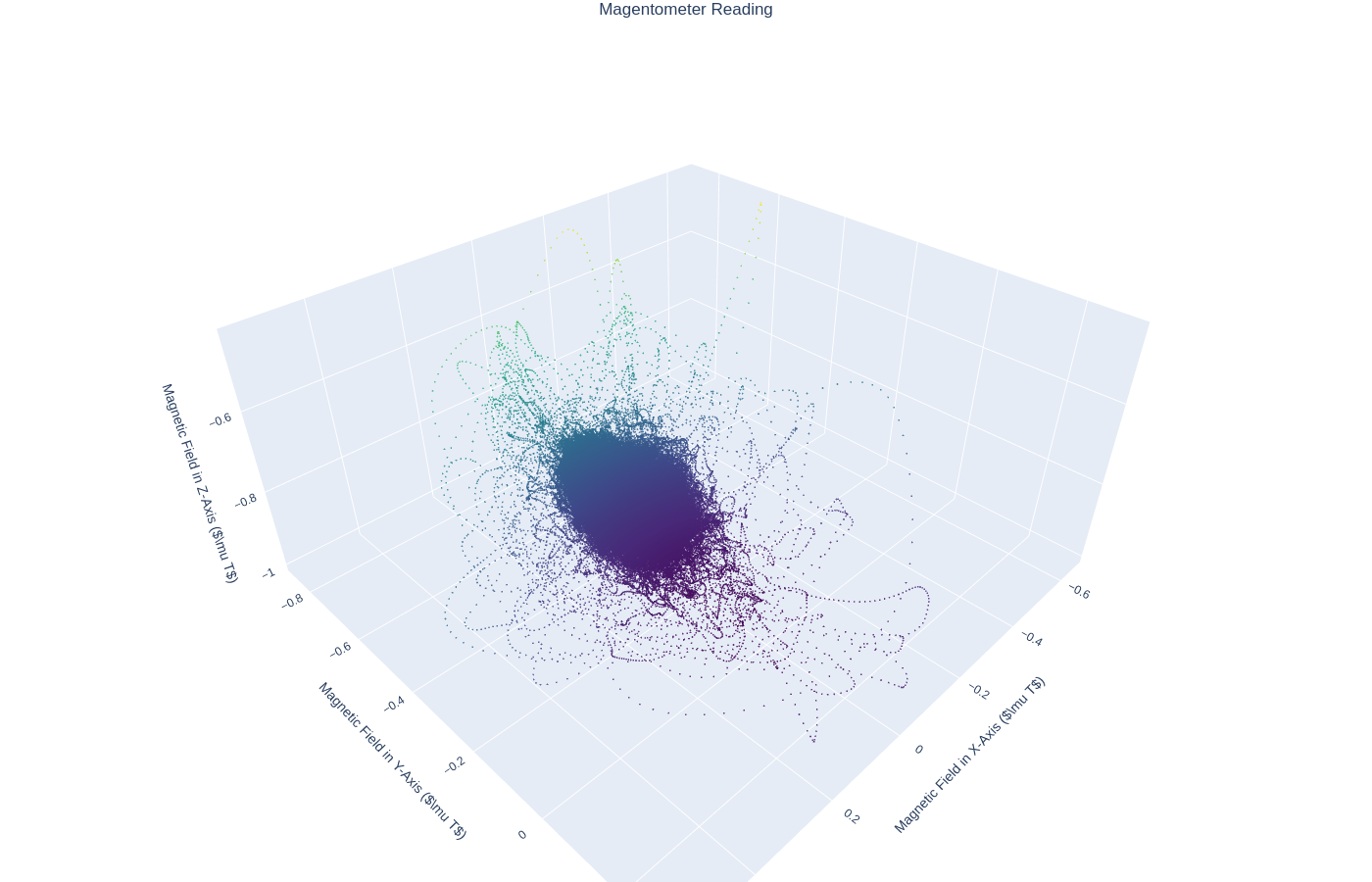
The magnetomer 3d scatter plot can be found here
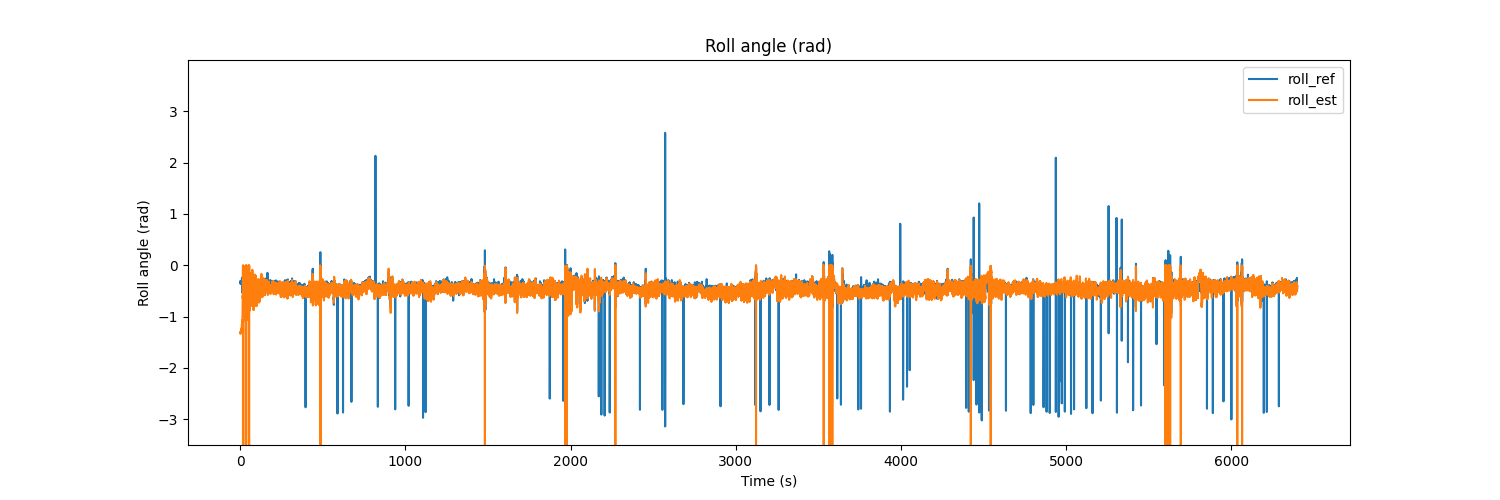
To test the dataset, we can use AHRS [2] library which has multiple sensor fusion algorithm for python. The Madgwick algorithm has been chosen as SFA.
fs = 100
dt = 1/fs
t = np.arange(0, acc.shape[0]/fs, dt)
madgwick = sfa.Madgwick(gyr=gyro, acc=acc, mag=mag, frequency=fs)
roll_ref, pitch_ref, yaw_ref = quat2eul(ori)
roll_est, pitch_est, yaw_est = quat2eul(madgwick.Q)
# Plot the results
# Roll
plt.figure(figsize=(15, 5))
plt.plot(t, roll_ref, label='roll_ref')
plt.plot(t, roll_est, label='roll_est')
plt.title('Roll angle (rad)')
plt.xlabel('Time (s)')
plt.ylabel('Roll angle (rad)')
plt.ylim(-3.5, 3.999)
plt.legend(loc='upper right')
plt.show()
# Pitch
plt.figure(figsize=(15, 5))
plt.plot(t, pitch_ref, label='pitch_ref')
plt.plot(t, pitch_est, label='pitch_est')
plt.title('Pitch angle (rad)')
plt.xlabel('Time (s)')
plt.ylabel('Pitch angle (rad)')
plt.ylim(-3.5, 3.999)
plt.legend(loc='upper right')
plt.show()
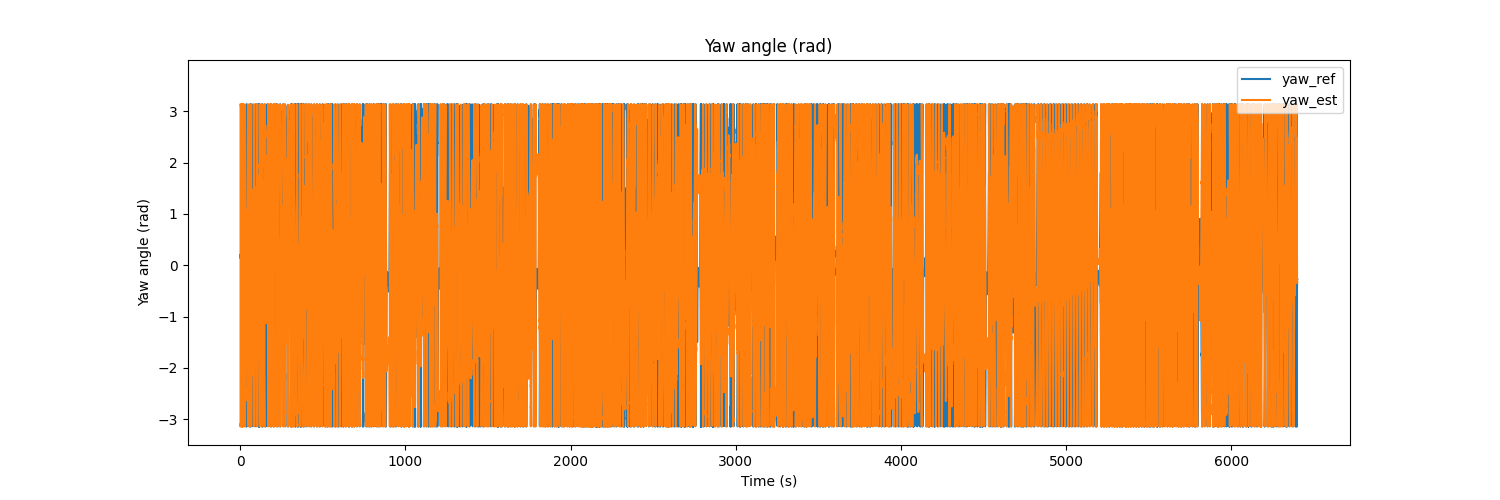
# Yaw
plt.figure(figsize=(15, 5))
plt.plot(t, yaw_ref, label='yaw_ref')
plt.plot(t, yaw_est, label='yaw_est')
plt.title('Yaw angle (rad)')
plt.xlabel('Time (s)')
plt.ylabel('Yaw angle (rad)')
plt.ylim(-3.5, 3.999)
plt.legend(loc='upper right')
plt.show()
The result would be as follows

References
[1] C. Chen, P. Zhao, C. X. Lu, W. Wang, A. Markham, and N. Trigoni, “Oxiod: The dataset for deep inertial odometry,” arXiv preprint arXiv:1809.07491, 2018. Link
Arman Asgharpoor Golroudbari
Machine Learning Engineer
Machine Learning Engineer with 5+ years of experience in LLMs, transformer architectures, computer vision systems, and autonomous robotics.